1. TATA BRABO Industrial Robotic Arm

TAL Brabo’s two 5-axis serial manipulators each having the payload capacity of 10 Kg are installed in the UG lab of the mechanical engineering department IIT Ropar.
lo trovi quiDedicated Robotic cell is installed with collaboration with Tata Automation Limited, for the skill development training of Industry Personnels.
2. Modular Reconfigurable Manipulators
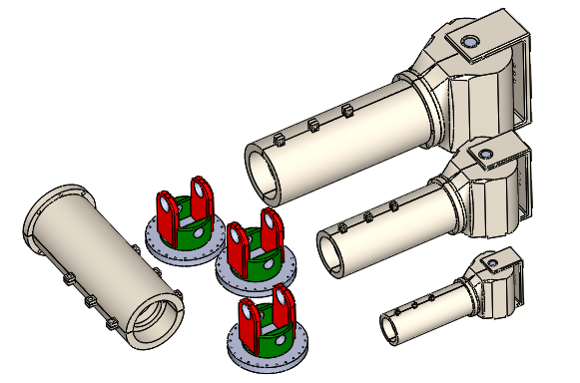
Non-repetitive tasks there is a need for customized manipulators which can be deployed on-site as per requirement. Re-configurable manipulators are better options to get customized manipulators. Customization can be achieved through a modular library which can be used to develop required configuration. The proposed modular re-configurable arm is having a set of three types of modules named as Heavy (H), Medium(M)and light(L). These modules are having different sizes but similar architecture. Modules are designed so as to adapt the Denavit-Hartenberg (DH) parameters. Flexibility in architecture is effective in dealing with the requirements of the workspace. The sizes of theses modules were chosen based upon the actuators selected considering the worst configuration of a manipulator in the static case. The modules can be arranged in different combinations following some set of rules and a configuration can be obtained as per the requirement of the task space
3. Mini Universal Testing Machine

A universal testing machine (UTM), also known as a universal tester, materials testing machine or materials test frame, is used to test the tensile, compressive and bending strength of materials.
Limitations of the equipment
Load cells limit = 1000 N
Test speed range = 0.001 to 2000 mm/min
Maximum crosshead travel =
Test sample considerations
Only flat samples, not round, can be tested.
The machine is designed only for non-metallic, soft samples such as polymer composites, rubber etc.
4. Precision-CNC Lathe and CNC-Milling Machine